NVIDIA는 왜 로봇 AI를 공짜로 풀었나 — Physical AI 패권 전쟁
NVIDIA의 기술 공개 이면에 숨겨진 3층 IP 구조와 '오픈소스를 미끼로 활용한 자체 IP 락인(Lock-in) 전략'을 분석하고, 국내 로보틱스 스타트업이 종속을 피하기 위해 구축해야 할 독자적 IP 영역 확보의 실무적 가이드를 제시합니다.


서론: 라스베이거스의 환호와 실리콘밸리의 베팅
2026년 3월 16일 오전, 라스베이거스 SAP Center에서 열린 GTC 2026 무대에서 젠슨 황(Jensen Huang)은 파격적인 선언을 했습니다. Physical AI 파운데이션 모델인 'Isaac GR00T N1.6'을 오픈소스로 전격 공개한다는 내용이었습니다. 코드는 GitHub에, 모델 가중치는 Hugging Face에 배포되어 누구나 무료로 사용할 수 있게 되었습니다.
그러나 비슷한 시각, 실리콘밸리의 투자 커뮤니티는 또 다른 뉴스에 술렁였습니다. 리비안(Rivian)에서 분사한 로보틱스 스타트업 'Mind Robotics'가 시리즈 A에서 5억 달러(약 6,700억 원)라는 기록적인 투자금을 유치했기 때문입니다.
이 두 사건은 하나의 근본적인 질문으로 귀결됩니다. "NVIDIA는 왜 이 귀한 기술을 공짜로 풀었으며, 투자자들은 무엇을 믿고 스타트업의 지능에 천문학적인 자금을 베팅했는가?"
1. Physical AI의 부상: 왜 지금 폭발하는가
'Physical AI'는 디지털 지능이 실제 물리 공간에서 작동하는 형태를 의미합니다. 화면 속에 머물던 AI가 공장, 수술실, 물류창고로 나와 물건을 집고 사람과 협업하는 시대가 열린 것입니다. 2026년 현재, 이 흐름이 폭발한 데에는 세 가지 핵심 요인이 있습니다.
VLA(Vision-Language-Action) 모델의 현실화: LLM이 로봇에게 '생각하는 법'을 이식했습니다. 자연어 명령을 구체적인 로봇 동작으로 변환하는 기술이 성숙하며 로봇의 범용성이 극대화되었습니다.
합성 데이터(Synthetic Data)를 통한 비용 절감: NVIDIA의 Isaac Sim과 Cosmos 플랫폼은 가상 환경에서 수백만 시간 분량의 학습 데이터를 자동으로 생성합니다. 이는 실세계 데이터 수집에 드는 막대한 시간과 비용을 획기적으로 줄였습니다.
자본의 집중: Figure AI(2024년 6.7억 달러)와 Mind Robotics(2026년 5억 달러)의 대규모 펀딩은 단순히 R&D를 위한 자금이 아닙니다. 실제 physical AI 시대로의 전환에 베팅하는 돈입니다.
2. NVIDIA의 3층 IP 구조: 공개하고, 감추고, 선점하다
NVIDIA가 로봇 AI 모델을 오픈소스로 공개하는 것은 자선 사업이 아닙니다. 그들의 지식재산(IP) 전략은 철저하게 계산된 3층 구조로 설계되어 있습니다.
층위 | 항목 | 전략적 목적 | 비고 |
layer #1: 공개 | Isaac GR00T N1.6, NemoClaw | 개발자 생태계 포섭 및 R&D 외부화 | 오픈소스(GitHub, HF) |
layer #2: 은닉 | CUDA 런타임, Cosmos 물리 엔진 | 독점 인프라 종속 및 진입 장벽 구축 | 특허 및 영업비밀 |
layer #3: 선점 | 표준 API, Jetson 엣지 칩 | 시장 표준 장악 및 지속적 수익 창출 | 플랫폼 비즈니스 |
NVIDIA의 핵심 전략은 '오픈소스를 미끼로 활용하여 사용자를 자체 IP(2층, 3층)에 락인(Lock-in)시키는 것'입니다. 모델과 프레임워크를 공개하여 수만 명의 개발자를 우군으로 포섭하고, 이들이 만든 로봇이 제대로 작동하려면 결국 NVIDIA의 독점 인프라(Cosmos 시뮬레이션, Jetson 칩 등)를 써야만 하게 만듭니다.
오픈소스를 통해 시장 표준을 선점하고, 인프라로 지속적인 수익을 올리는 전형적인 플랫폼 독점 전략이 Physical AI에서도 재현되고 있습니다. 스타트업 입장에서는 1층의 단물을 마시는 동시에 2층, 3층으로의 기술 종속 리스크를 안게 되는 것입니다.
3. Physical AI 특허 전략: '지능형 시스템'으로의 전환
최신 분석 보고서(출처: Analysis of collaborative robot technology patent map and research on development trends (Di Zhang & Lihua Liu, Scientific Reports, 2025))에 따르면, 글로벌 협동 로봇 및 Physical AI 분야의 특허 전략은 급격한 변화를 맞이하고 있습니다.
Invention 특허의 압도적 비중
이 분야 특허의 약 92.65%가 invention 특허이며, 이는 단순한 외형이나 미적 개선이 아닌 핵심 기술 혁신이 경쟁의 본질임을 시사합니다.
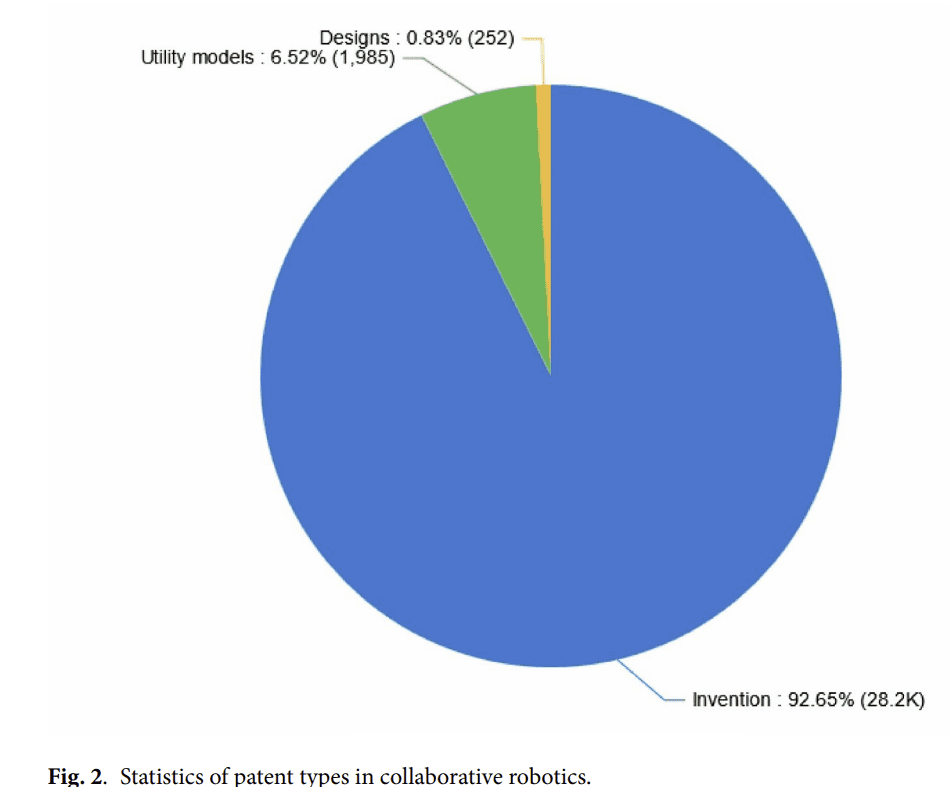
협동 로봇의 특허 유형 통계 (출처: Analysis of collaborative robot technology patent map and research on development trends (Di Zhang & Lihua Liu, Scientific Reports, 2025))
하드웨어에서 지능으로의 이동
과거에는 로봇 팔(B25J9)이나 부속품(B25J19) 같은 하드웨어 특허가 중심이었으나, 최근에는 자율 주행 제어(G05D1)와 머신러닝(G06N20) 등 인공지능 통합 시스템으로 특허의 무게중심이 이동하고 있습니다.
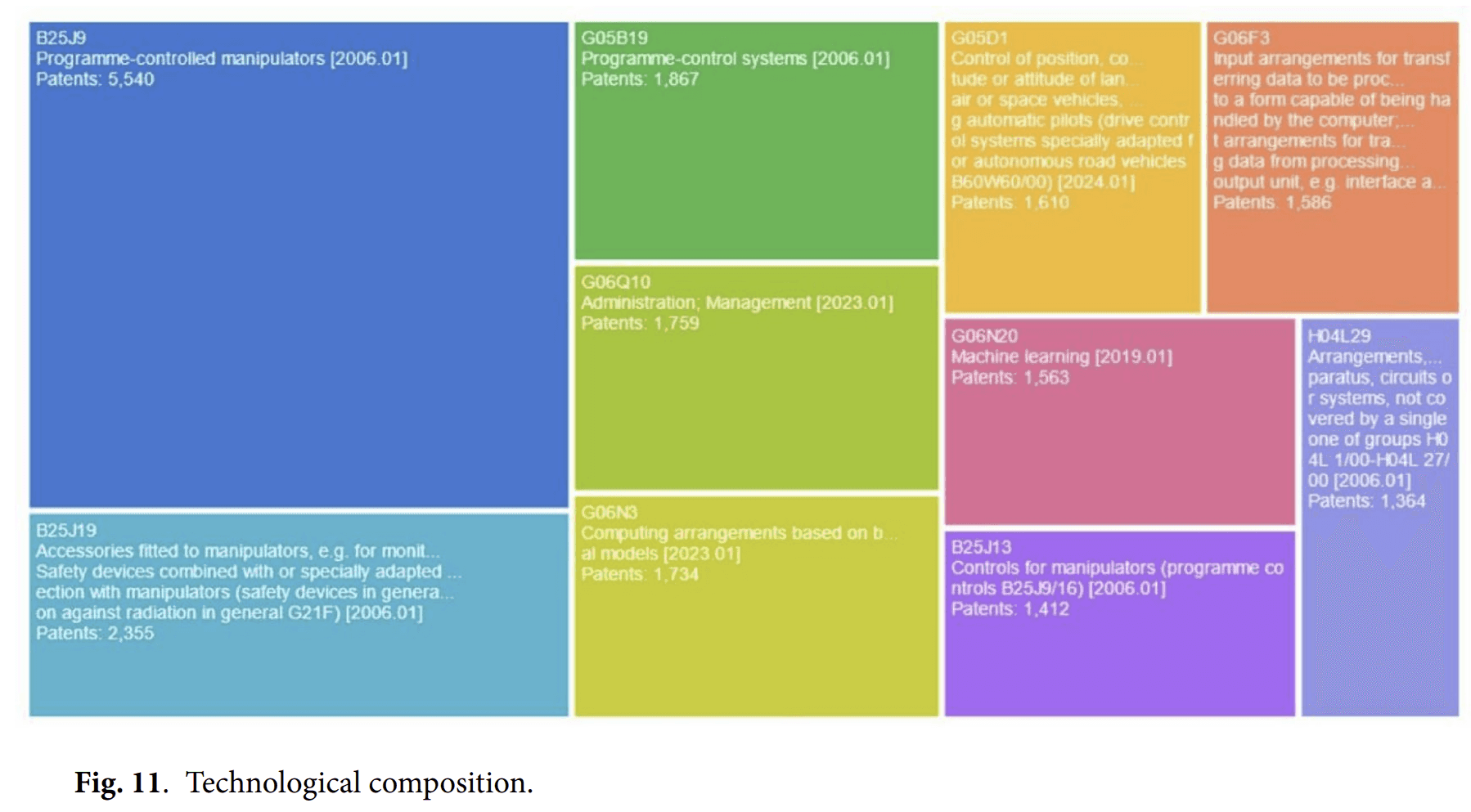
특허 기술 분야 통계 (출처: Analysis of collaborative robot technology patent map and research on development trends (Di Zhang & Lihua Liu, Scientific Reports, 2025))
빅테크 기업의 로봇 산업 장악
미국은 머신러닝(G06N20), 네트워크(H04L29), 지능형 제어 시스템에서 압도적인 우위를 보이며 3계층 전략의 상단(인프라와 표준)을 장악하고 있습니다. 반면 중국은 하드웨어와 프로그램 제어(B25J9/19) 등 제조 중심의 1계층에서 강세를 보입니다
전 세계 특허 출원량 최상위 기업은 전통 로봇 제조사가 아닌 Qualcomm(퀄컴), NVIDIA(엔비디아), Intel(인텔), Bright Data(데이터 플랫폼) 등이며, 이는 협동 로봇 산업의 핵심이 단순 기계 장치에서 통신, 칩셋, 데이터 처리 기반의 기술로 옮겨갔음을 시사합니다.
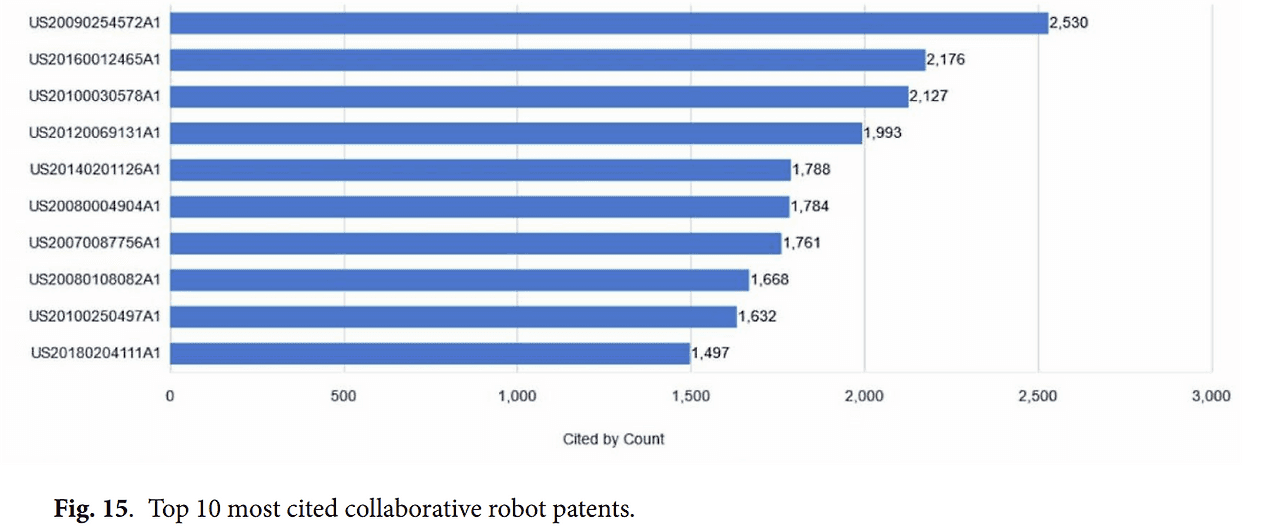
최대 인용 협동로봇 특허 (출처: Analysis of collaborative robot technology patent map and research on development trends (Di Zhang & Lihua Liu, Scientific Reports, 2025))
주요 기업별 IP 전략
주요 기업들은 physical AI를 구성하는 다양한 기술 계층들에 대하여, 본인들의 강점을 IP화하고 있습니다.
대표적인 예시는 아래와 같습니다.
NVIDIA | 플랫폼 인프라 + 표준 선점 | 합성데이터, 시뮬레이션, 파운데이션 모델 |
Boston Dynamics (현대) | 하드웨어 움직임의 IP화 | 이족보행 알고리즘, 낙하-복구, 산업 검사 |
Figure AI | LLM 연동 로봇 제어 | 자연어-동작 변환, 자동차 조립라인 특화 |
1X Technologies | 소프트 조작 | 유연한 물리 인터랙션, EPO 병행 출원 |
Mind Robotics | 풀스택 산업 특화 | VLA 산업 적용, 사람-로봇 협업 안전 |
[표 1] 기업IP 전략 핵심주요 특허 영역
아래의 보스턴 다이나믹스의 2025년 12월 출원된 특허를 참고하면, 센서로부터 획득된 이미지를 기반으로 포인팅 타겟을 설정하기 위한 레그의 움직임을 설명하고 있습니다. 이는, 특정 트리거(예: 센싱)에 따른 로봇 하드웨어의 움직임을 권리화하려는 대표적인 예시입니다.
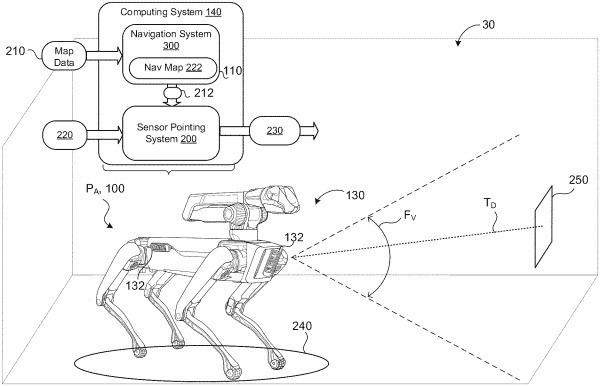
보스턴 다이나믹스의 특허(US19-358968 (2025.10.15 출원))
Physical AI 시대에서 필요한 특허 전략은, 기업은 단순히 하드웨어 또는 소프트웨어만 개발하는 것이 아니라, 하드웨어 구조(특허), 알고리즘(특허+영업비밀), 실제 공장 운영 데이터(계약 기반 영업비밀), 도메인 특이 시나리오(UI/UX 특허)를 촘촘하게 연결하는 '풀스택 IP 중첩 보호'하는 것입니다.
4. 결론: 독자적인 '경계' 구축하기
Physical AI 시대의 패권은 가장 빠른 로봇을 만드는 회사가 아니라, 외부 플랫폼의 힘을 빌리면서도 자신만의 독자적인 영역을 구축한 회사가 쥐게 될 것입니다. NVIDIA가 오픈소스를 미끼로 활용하는 '인프라 락인' 전략을 정확히 이해하고, 스타트업은 자사 고유의 IP 경계를 어디에 설정하고 어떻게 강화해야 할지에 대한 치밀한 전략을 수립해야 합니다. 단순히 IP 포트폴리오를 구축하는 것을 넘어, 전략적인 IP 관리와 독자적 영역 확보가 생존의 핵심입니다.
[참조 자료]
NVIDIA Newsroom (2026.03.16): "Supercharging Robot Learning with NVIDIA Isaac GR00T N1.6"
TechCrunch (2026.03.11): "Rivian spin-out Mind Robotics raises $500M for industrial AI-powered robots"
Analysis of collaborative robot technology patent map and research on development trends (Di Zhang & Lihua Liu, Scientific Reports, 2025)
CNBC (2026.03.10): "NVIDIA NemoClaw: The Open-Source Physical AI Agent Platform"
Author










동일 기술 분야 칼럼 더보기
이 글과 같은 기술 분야의 IP 전략 인사이트를 이어서 확인해보세요.







